
โปรเจค นี้จะเป็นการนำ ESP8266 NodeMCU V3 และ Relay ควบคุมการเปิดปิด อุปกรณ์ไฟฟ้า AC 220V ผ่าน WiFi ด้วยโทรศัพท์ Android และแสดง ไอพี ของ NodeMCU ที่ OLED Display
ควบคุมทุกสรรพสิ่งภายในบ้านของคุณด้วย ESP8266 NodeMCU หรือ Home Automation ระบบนี้เป็นระบบที่ใช้ควบคุมอุปกรณ์ไฟฟ้าต่างๆผ่าน WiFi โดยที่สามารถควบคุมได้ผ่านระบบอินทราเน็ต (ที่ใช้ WiFi หรือ วง แลน หรือใช้ เราเตอร์ เดียวกัน เท่านั้น) โดยที่ใช้ NodeMCU เป็น Server Controller แบบ Station (STA) Mode เป็นโหมดที่กำหนดให้ ESP8266 ไปเชื่อมต่อกับอุปกรณ์อื่น ๆ เช่น เร้าเตอร์ แล้วรับส่งข้อมูลระหว่างเครื่องในวงแลนได้

.
อุปกรณ์ที่ใช้
1. NodeMCU V3 CH340G Lua WIFI ESP8266 ESP-12E
2. Micro USB Cable Wire 1m for NodeMCU
3. NodeMcu Breadboard for NodeMCU V3
4. Blue OLED Display 0.96 inch 128X64 Module
5. Relay 4 Channel 5V DC Solid State Active High Module
6. Adapter DC 9V 1A Power Supply
7. Jumper (F2F) cable 20cm Female to Female
8. เสารองแผ่นพีซีบีโลหะแบบเหลี่ยม 8 mm.
9. เสารองแผ่นพีซีบีแบบโลหะ ยาว 25 มม.
.
*** หลอดไฟ และ อุปกรณ์ไฟฟ้าอื่นๆ ***
1. ประกอบวงจร
การเชื่อมต่อระหว่าง NodeMcu Breadboard กับ Blue OLED Display

การเชื่อมต่อระหว่าง NodeMcu Breadboard กับ Relay 4 Channel


ประกอบ NodeMCU เข้ากับ Breadboard

ภาพรวมการประกอบ

ภาพรวมการประกอบ

2. อัพโหลดโปรแกรม
เชื่อมต่อ สาย USB ระหว่าง คอมพิวเตอร์ กับ NodeMCU
เชื่อมต่อ สาย USB ระหว่าง คอมพิวเตอร์ กับ NodeMCU
ป้อนไฟ 9 โวลต์ จาก อะแด็ปเตอร์ เข้าสู่ ซัพพลาย ของ Breadboard NodeMCU V3

2.1 ตรวจสอบการติดตั้งไดร์เวอร์ ของ NodeMCU V3
โดย คลิกขวา Computet -> Properties

คลิกที่ Device Manager

ที่ Ports (COM & LPT) จะพบ ไดร์เวอร์ ของ NodeMCU V3
ในตัวอย่างเป็น USB -SERIAL CH340 (COM8)

โดย คลิกขวา Computet -> Properties

คลิกที่ Device Manager

ที่ Ports (COM & LPT) จะพบ ไดร์เวอร์ ของ NodeMCU V3
ในตัวอย่างเป็น USB -SERIAL CH340 (COM8)

2.2 ติดตั้ง แพลตฟอร์ม ESP8266
การจะใช้ NodeMCU ได้นั้น จำเป็นต้องติดตั้ง แพลตฟอร์ม ESP8266 เพื่อ ทำการติดต่อ ระหว่าง Arduino IDE กับ NodeMCU
ลิงค์ : ขั้นตอนการติดตั้ง แพลตฟอร์ม ESP8266
2.3 ติดตั้ง Library ของ Blue OLED Display
ดาวน์โหลด Library ของ Blue OLED Display Module
2.3.1 ดาวน์โหลด ไลบรารี่ Adafruit-GFX-Library
https://github.com/adafruit/Adafruit-GFX-Library
โดย ไปที่ Sketch -> Include Library -> Add.ZIP Library....

เลือกซิปไฟล์ Adafruit-GFX-library-master ที่ดาวน์โหลดมา

เมื่อตรวจสอบ ที่ Sketch -> Include Library -> จะพบ Adafruit GFX Library เพิ่มเข้ามาที่ Arduino IDE

2.3.2 ดาวน์โหลด ไลบรารี่ Adafruit_SSD1306
https://github.com/adafruit/Adafruit_SSD1306
เพิ่ม ไลบรารี่ Adafruit_SSD1306 เข้าที่ Arduino IDE
โดย ไปที่ Sketch -> Include Library -> Add.ZIP Library....

เลือก ซิปไฟล์ Adafruit_SDD1306-master ที่ดาวน์โหลดมา

เมื่อตรวจสอบ ที่ Sketch -> Include Library -> จะพบ Adafruit_SDD1306 เพิ่มเข้ามาที่ Arduino IDE

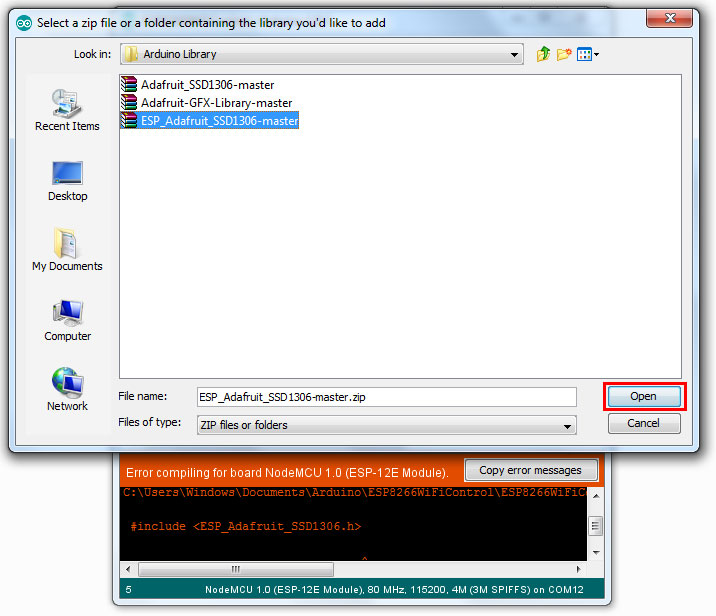
2.3.4 ดาวน์โหลด ไลบรารี่ ESP_Adafruit_SSD1306
การใช้งาน OLED Display กับ ESP8266 นั้น จำเป็นต้องติดตั้ง ไลบรารี่ ESP_Adafruit_SSD1306 เพิ่มเข้ามาอีกหนึ่งขั้นตอน
ดาวน์โหลด ไลบรารี่ ESP_Adafruit_SSD1306
https://github.com/cmmakerclub/ESP_Adafruit_SSD1306
เพิ่ม ไลบรารี่ ESP_Adafruit_SSD1306 เข้าที่ Arduino IDEโดย
ไปที่ Sketch -> Include Library -> Add.ZIP Library....
เลือก ซิปไฟล์ ESP_Adafruit_SSD1306-master ที่ดาวน์โหลดมา
ถึงขัั้นตอนนี้ Arduino IDE ของเราก็พร้อมที่จะทำงานในขั้นตอนต่อไป
2.4 คัดลอกโค้ด
การใช้งาน Digital I/O ของ ESP8266 NodeMCU V3 นั้น สามารถ ใช้งานคำสั่ง digitalWrite, digitalRead ได้เช่นเดียวกับการใช้งาน Digital I/O ของ Arduino โดยกำหนดหมายเลขของ Pin เช่นตัวอย่าง Pin ที่ 14 หรือจะกำหนดชื่อ Pin โดยอ้างตามชื่อ Pin บนบอร์ด NodeMCU V3 เป็น D5 ก็ได้เช่นกัน

เปิดโปรแกรม Arduino (IDE) และ ก็อปปี้ โค้ดด้านล่างนี้ ไปวางไว้ในส่วนเขียนโปรแกรม
#include <ESP8266WiFi.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
#include <ESP8266mDNS.h>
#include <Adafruit_GFX.h>
#include <ESP_Adafruit_SSD1306.h>
#define OLED_RESET 4
Adafruit_SSD1306 display(OLED_RESET);
#if (SSD1306_LCDHEIGHT != 64)
#error("Height incorrect, please fix Adafruit_SSD1306.h!");
#endif
const char* ssid = "YOUR_NETWORK_NAME";
const char* password = "YOUR_NETWORK_PASSWORD";
ESP8266WebServer server(80);
const int output1 = 14; // D5
const int output2 = 12; // D6
const int output3 = 13; // D7
const int output4 = 15; // D8
boolean device1 = false;
boolean device2 = false;
boolean device3 = false;
boolean device4 = false;
void handleRoot() {
//digitalWrite(led, 1);
//server.send(200, "text/plain", "hello from esp8266!");
//digitalWrite(led, 0);
String cmd;
cmd += "<!DOCTYPE HTML>\r\n";
cmd += "<html>\r\n";
//cmd += "<header><title>ESP8266 Webserver</title><h1>\"ESP8266 Web Server Control\"</h1></header>";
cmd += "<head>";
cmd += "<meta http-equiv='refresh' content='5'/>";
cmd += "</head>";
if(device1){
cmd +=("<br/>Device1 : ON");
}
else{
cmd +=("<br/>Device1 : OFF");
}
if(device2){
cmd +=("<br/>Device2 : ON");
}
else{
cmd +=("<br/>Device2 : OFF");
}
if(device3){
cmd +=("<br/>Device3 : ON");
}
else{
cmd +=("<br/>Device3 : OFF");
}
if(device4){
cmd +=("<br/>Device4 : ON");
}
else{
cmd +=("<br/>Device4 : OFF");
}
cmd += "<html>\r\n";
server.send(200, "text/html", cmd);
}
void handleNotFound(){
//digitalWrite(led, 1);
String message = "File Not Found\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET)?"GET":"POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
for (uint8_t i=0; i<server.args(); i++){
message += " " + server.argName(i) + ": " + server.arg(i) + "\n";
}
server.send(404, "text/plain", message);
//digitalWrite(led, 0);
}
void setup(void){
pinMode(output1, OUTPUT);
pinMode(output2, OUTPUT);
pinMode(output3, OUTPUT);
pinMode(output4, OUTPUT);
digitalWrite(output1, LOW);
digitalWrite(output2, LOW);
digitalWrite(output3, LOW);
digitalWrite(output4, LOW);
Serial.begin(115200);
WiFi.begin(ssid, password);
Serial.println("");
// by default, we'll generate the high voltage from the 3.3v line internally! (neat!)
//display.begin(SSD1306_SWITCHCAPVCC, 0x3D); // initialize with the I2C addr 0x3D (for the 128x64)
display.begin(SSD1306_SWITCHCAPVCC, 0x78>>1); // init done
display.clearDisplay(); // Clear the buffer.
display.setTextSize(2);
display.setTextColor(WHITE);
//display.setTextColor(BLACK, WHITE); // 'inverted' text
display.setCursor(0,0);
display.println(" ESP8266");
display.setTextSize(3); //Size4 = 5 digit , size3 = 7 digits
//display.setTextColor(BLACK, WHITE); // 'inverted' text
display.setTextColor(WHITE);
display.setCursor(0,18);
display.println("Control");
display.setTextSize(1);
display.setTextColor(WHITE);
//display.setTextColor(BLACK, WHITE); // 'inverted' text
display.setCursor(0,52);
display.println("Version 0.1");
display.display();
delay(2000);
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
//display.setTextColor(BLACK, WHITE); // 'inverted' text
display.setCursor(0,0);
display.println("Connecting");
// Wait for connection
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
display.print(".");
display.display();
}
Serial.println("");
Serial.print("Connected to ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
display.clearDisplay();
display.setTextSize(1); display.setTextColor(WHITE);
display.setCursor(0,0); display.println(ssid);
display.setTextSize(2); display.setTextColor(WHITE);
display.setCursor(0,18); display.println(WiFi.localIP());
//display.setCursor(0,36); display.println(WiFi.localIP());
display.display();
if (MDNS.begin("esp8266")) {
Serial.println("MDNS responder started");
}
server.on("/", handleRoot);
server.on("/status1=1", [](){
server.send(200, "text/plain", "device1 = ON");
digitalWrite(output1, HIGH);
device1 = true;
});
server.on("/status1=0", [](){
server.send(200, "text/plain", "device1 = OFF");
digitalWrite(output1, LOW);
device1 = false;
});
server.on("/status2=1", [](){
server.send(200, "text/plain", "device2 = ON");
digitalWrite(output2, HIGH);
device2 = true;
});
server.on("/status2=0", [](){
server.send(200, "text/plain", "device2 = OFF");
digitalWrite(output2, LOW);
device2 = false;
});
server.on("/status3=1", [](){
server.send(200, "text/plain", "device3 = ON");
digitalWrite(output3, HIGH);
device3 = true;
});
server.on("/status3=0", [](){
server.send(200, "text/plain", "device3 = OFF");
digitalWrite(output3, LOW);
device3 = false;
});
server.on("/status4=1", [](){
server.send(200, "text/plain", "device4 = ON");
digitalWrite(output4, HIGH);
device4 = true;
});
server.on("/status4=0", [](){
server.send(200, "text/plain", "device4 = OFF");
digitalWrite(output4, LOW);
device4 = false;
});
server.onNotFound(handleNotFound);
server.begin();
Serial.println("HTTP server started");
}
void loop(void){
server.handleClient();
}
2.5 แก้ไขโค้ด
ก่อนการอัพโหลดต้องแก้ไขโค้ด ตรงตัวอักษรสีแดงให้ถูกต้องตาม ตามเครือข่าย WiFi ที่เลือกใช้งาน โดย
"YOUR_NETWORK_NAME" คือ ชื่อWiFiที่ต้องการเชื่อมต่อ
"YOUR_NETWORK_PASSWORD" คือ รหัสผ่าน
ตรวจความถูกต้องแบบละเอียด เช่น...ตัวพิมพ์เล็ก , ตัวพิมพ์ใหญ่ อักขระต่างๆ ให้ถูกต้อง

2.6 อัพโหลดโค้ดที่แก้ไขแล้ว
เลือก Port ในตัวอย่างเป็น "COM8"

เลือก Board : NodeMCU 1.0 (ESP-12E Module)

อัพโหลด....

รอจนกระทั่ง Done uploading. 100%

OLED Display จะแสดง ไอพี ของ NodeMCU V3 ในตัวอย่างเป็น 192.168.1.41

...
3. ติดตั้งแอพควบคุม
และ ดาวโหลดแอพได้ที่
การติดตั้ง..เหมือนแอพทั่วๆไป
เมื่อเปิด.. แอพขึ้นมา คลิกที่ CONNECT

แอพจะให้ป้อน IP Address และ Port

IP Address ป้อน IP ที่ได้จาก OLED Display ในตัวอย่างเป็น 192.168.1.41
และ Port เป็น 80 -> SAVE

แอพ จะ แสดงการเชื่อมต่อ กับ IP 192.168.1.41
คลิกที่ CONNECT TO

จะแสดง ปุ่ม ในการควบคุม

โดยเมื่อ ให้ POWER ON
LED ของ Relay ช่องที่1 จะติด

เมื่อ แตะ ให้ POWER ON ทั้ง 4

LED ของ Relay ช่องที่ 1 ถึง 4 จะติด
แสดงว่าโปรเจคของเรานั้นพร้อมทำงานแล้ว
4. เชื่อมต่อ หลอดไฟ กับ รีเลย์








































